跟启发它的螃蟹一样,该机器人利用其各向异性的腿垂直挖掘颗粒状介质--各向异性允许材料在不同方向移动时表现出不同的特性。
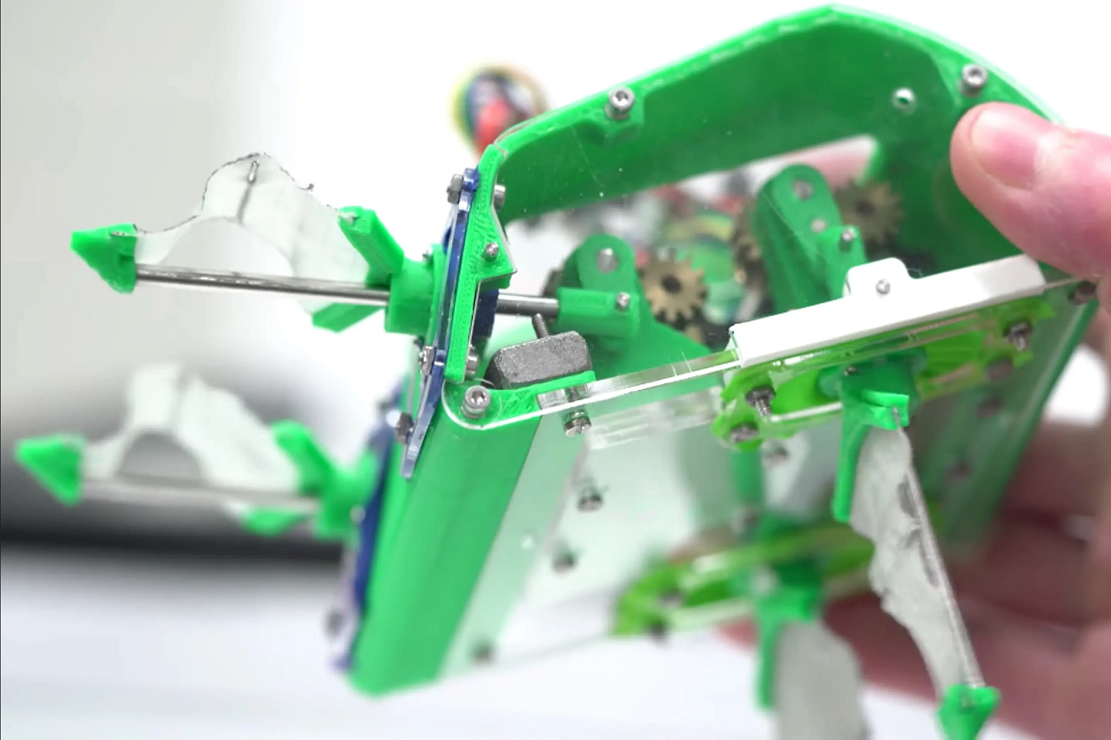
螃蟹有10条腿,而EMBUR只有4条。跟螃蟹的情况一样,机器人通过交替使用身体一侧的所有腿进行挖掘,然后再使用另一侧的所有腿进行扫荡。在EMBUR上,每条腿都采取了可延伸金属轴的形式,并有一条沿其纵向延伸的织物。
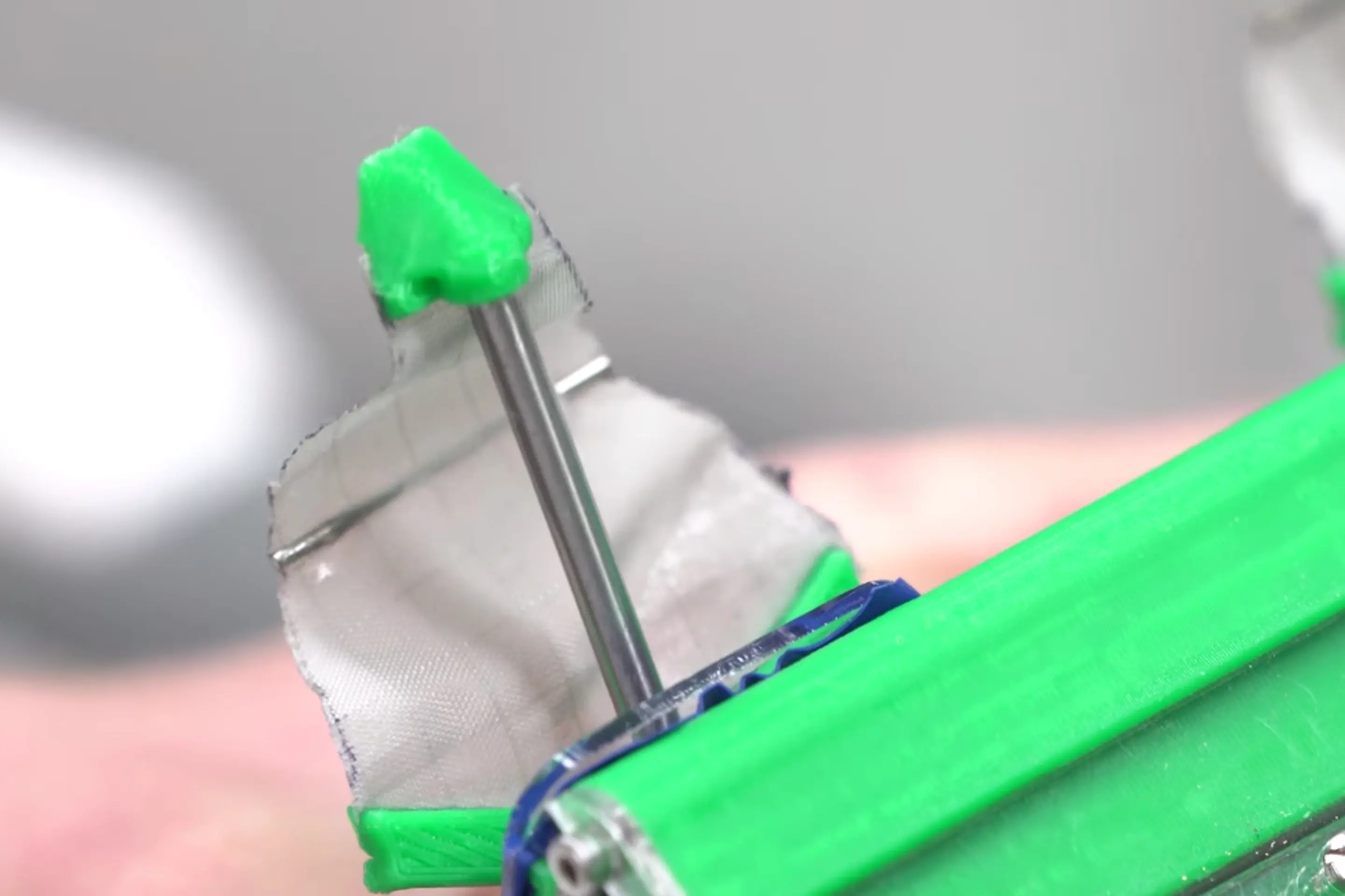
当腿在“动力冲程”中离开机器人的身体时,它就会拉长并将织物拉紧--这使得织物的作用有点像一个篮子,能收集和置换颗粒状介质。当腿被拉回身体时它就会缩短,并导致织物下垂和穿过颗粒物,而不是收集它们。
通过快速重复这些动作,EMBUR可以相对快速地埋葬自己。并且,机器人关节上的所有开口都覆有一层橡胶膜,这使得它们能自由移动,与此同时还能防止颗粒物进入并堵塞一切。

在Hannah Stuart助理教授的领导下,科学家们现在正在努力使该机器人能在实际的沙子和泥土中挖掘。希望它的后代有一天能被用于评估农业和建筑工地的土壤并从洋底收集科学数据,甚至还可以作为海洋车辆或航天器的锚。









